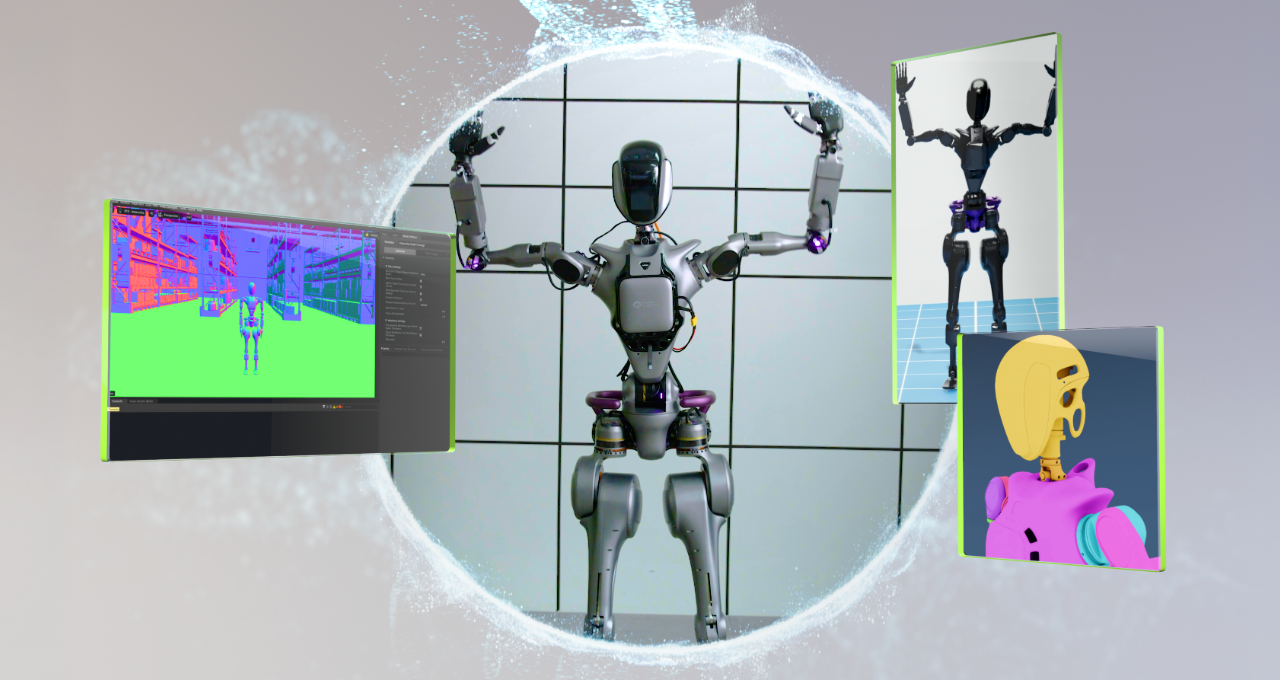
人形机器人正在迅速成为现实。基于 NVIDIA Isaac GR00T 的人形机器人已开始学习行走、操纵物体和与现实世界进行交互。
但收集用于训练这些复杂机器的各种大型数据集既费时又费钱。通过使用由达到物理精确的数字孪生生成的合成数据(SDG),研究者和开发者可在将 AI 模型部署到现实世界之前,先在仿真中对其进行训练和验证。
通用场景描述 (OpenUSD) 是一个功能强大的框架,它让构建这些达到物理精确的虚拟环境变得简单。而在构建 3D 环境后,团队可以使用 OpenUSD 开发详细、可扩展的仿真以及逼真的场景,让机器人在里面练习、学习和提高技能。
这些合成数据对于人形机器人学习类似人类的行为(例如行走、抓取物体和在复杂环境中穿梭)至关重要。OpenUSD 正在推动人形机器人的发展,并为这些机器在未来完全融入人们的日常生活创造条件。
借助 OpenUSD 驱动的 NVIDIA Omniverse 平台,开发者能够统一来自 3DCAD、数字内容创建(DCC)工具等不同来源的 3D 资产,进而构建大规模 3D 虚拟环境和运行复杂的仿真来训练机器人。这不但简化了整个流程,而且还让协作和开发物理 AI 变得更加快速、经济。
使用合成运动数据推进机器人训练
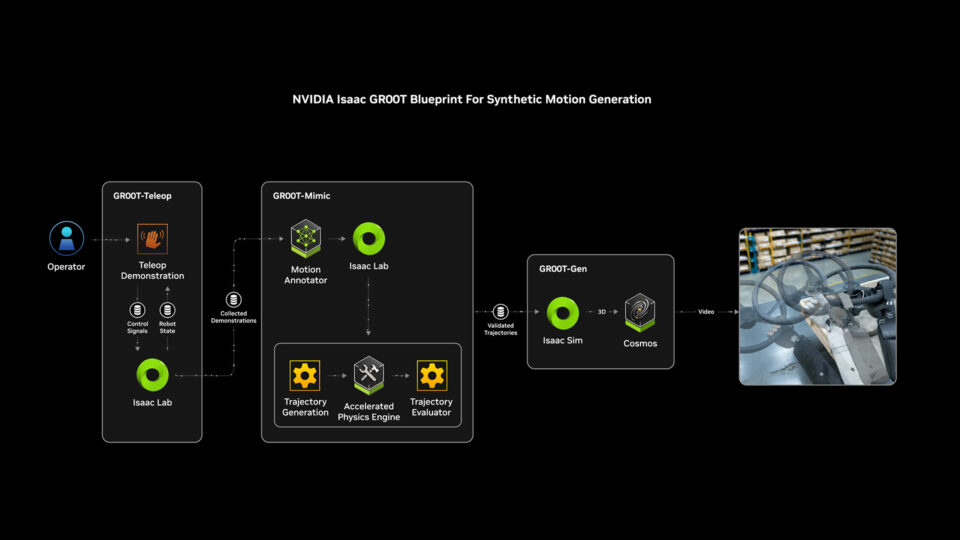
在 CES25 上,NVIDIA 发布了用于合成运动生成的 Isaac GR00T Blueprint。该蓝图能够帮助开发者生成比原来多数倍的合成运动数据集,以便使用仿真学习训练人形机器人。
此次发布的重点内容包括:
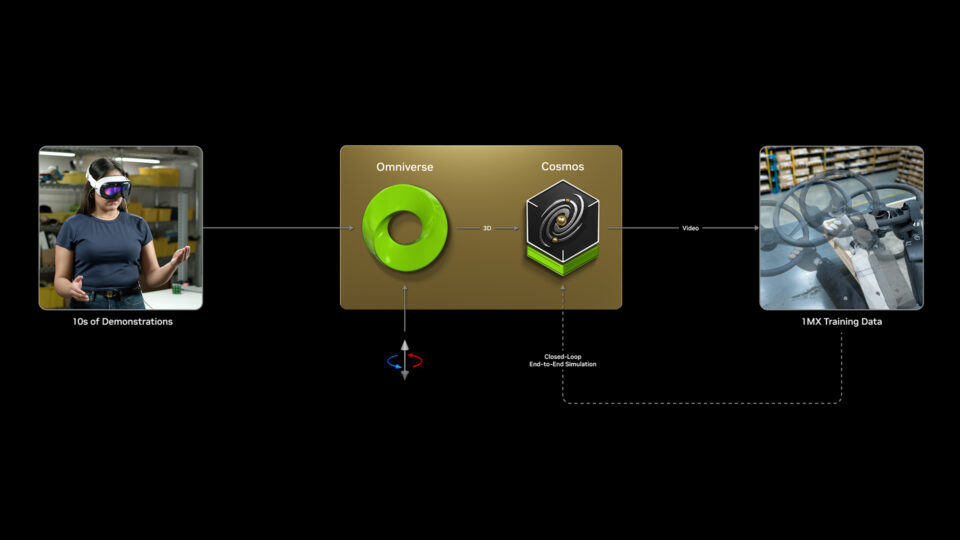
- 大规模运动数据生成:使用仿真和生成式 AI 技术生成指数级庞大且多样化的人动作数据集,加快数据采集过程。
- 更快的数据扩充速度:NVIDIA Cosmos 世界基础模型使用来自 Omniverse 的 ground-truth 仿真大规模生成逼真的视频,使开发者能够更快扩充用于训练物理 AI 模型的合成数据集,缩小从仿真到现实的差距。
- 以仿真为中心的训练:开发者可以在虚拟环境中训练机器人,而不是仅依赖现实世界中的测试,这让训练过程变得更加快速和经济。
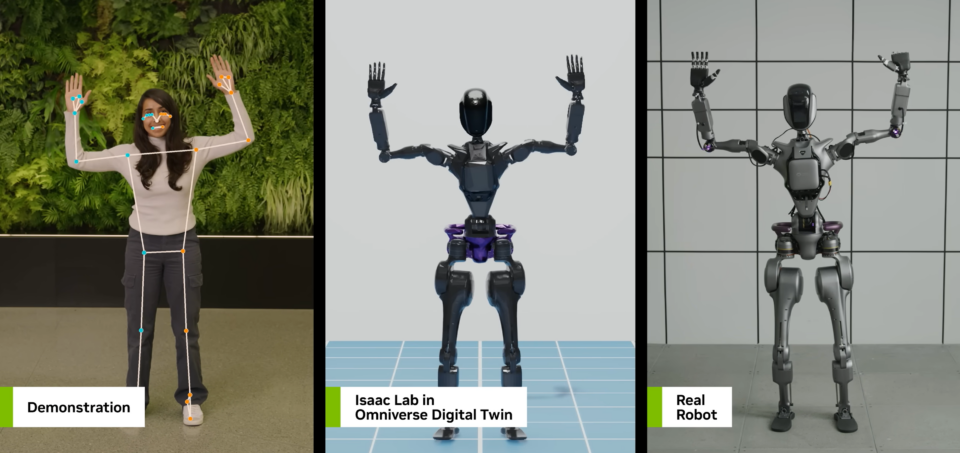
- 连接虚拟与现实:通过将真实数据和合成数据与基于仿真的训练和测试相结合,开发者能够把机器人在虚拟世界中学到的技能无缝迁移到现实世界。
实现对未来机器人的仿真
人形机器人正在通过实现复杂任务的自动化和增加对人类工人的安全保障,提高自身在制造、仓储物流、医疗等行业的效率、安全性和适应性。
Boston Dynamics、Figure 等大型机器人公司已开始使用 Isaac GR00T 并展示成果。
Scaled Foundations 正在降低从机械臂到人形机器人等各种形态的机器人的开发门槛。该公司的 Open GRID Platform 集成了 NVIDIA Isaac Sim,使开发者能够简单通过一个易于使用、基于浏览器的开发环境进行机器人仿真。
主题图片由 Fourier 提供。