Pieter Abbeel 在 NVIDIA 年度 NTECH 工程会议上发表在线讲话,为机器人技术的飞跃制定了路线图。
机器人领域的先驱 Pieter Abbeel 称,机器人需要实现巨大的 AI 训练飞跃,才能成为多功能助手,他为未来的这种神经网络大脑描绘了蓝图。
Abbeel 说道,如今家用机器人可以通过电子和机械两种方式实现,但它们缺乏能够驾驭各种情况的 AI 技术。
“仅借助我们的软件和 AI 技术,还不足以打造出色的家用机器人。”他解释道。
Abbeel 周三在 NVIDIA 的年度内部工程会议 NTECH 2021 上发表了讲话,吸引了数百名在线观众。
Abbeel 是加州大学伯克利分校电气工程和计算机科学系的教授,同时担任该所高校机器人学习实验室的主任和伯克利人工智能研究 (BAIR) 实验室的联合主任。除此之外,这位说话温和的比利时工程师还主持了机器人大脑播客。
Abbeel 曾在 OpenAI 工作了近两年,OpenAI 是由包括 Ilya Sutskever 在内的科技大咖于 2015 年成立的非营利组织,旨在开发和发布造福人类的通用人工智能。Ilya Sutskever 将在 GTC 2021 上发表演讲。
Abbeel 于 2017 年离开 OpenAI,随即创办了 Covariant,这是一家 AI 开发公司,致力于实现仓库和工厂的机器人自动化,目前已获得 1.47 亿美元的投资。在此之前,他共同创立了 AI 评级初创公司 Gradescope,该公司于 2018 年被收购。
机器人技术讲座结束后,NVIDIA 首席执行官黄仁勋与 Abbeel 进行了交谈,称他为“地球上最聪明的人之一”。
探讨机器人大脑
Abbeel 的讲座为创造多功能机器人打下了良好的开端,这些机器人拥有大脑,可以自己学习新任务。在此次讲座中,他提到了 Geoffrey Hinton 等许多 AI 研究人员的工作为实现这一目标奠定了基础。
他对深度学习技术先驱 Yann LeCun 称赞有加,他说用互联网视频为机器人训练一个大型神经网络来进行预测的想法非常有前景。机器人需要学习很多东西,助力解决机器人 AI 技术难题。
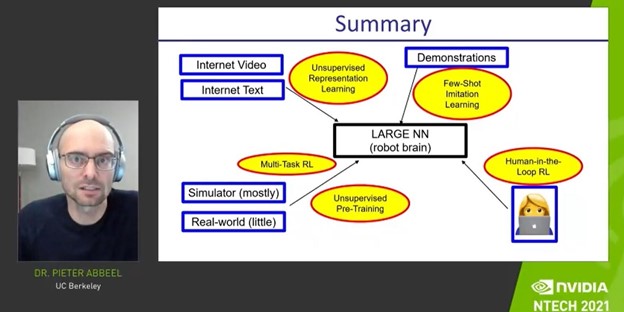
机器人可以从视频中学习完整的行为表现——一系列要做的事情——而不仅仅是使用图像。他说道:“要想创建一个良好的预训练神经网络,以快速用于其他现实世界机器人任务,视频预测可能是最大的缺失部分。”
文本训练对机器人来说也很重要。他接着说道,机器人可能会学到一个完整的故事来执行一系列事件,比如根据车主的命令将汽车交给汽车修理工,处理整个过程,包括驾驶和与修理工商量取车时间。
主要利用“模拟场景”进行训练
Abbeel 说,机器人主要利用模拟场景接受训练,因为使用大量真实场景慢慢训练机器人是不切实际的。
只需接受少量真实场景训练,就能确保机器人完成现实任务。他说道:“在现实世界中,很难收集数百万个场景。”
数以千计,甚至数百万计的仿真可以用于训练,以便在更短的时间内在神经网络上获得结果。
他继续说道:“模拟更经济实惠,您可以进行扩展,并行化运行多个模拟场景。”
研究成果商业化
在讲座结束后与黄仁勋的谈话中,Abbeel 提到了将大学研究与商业应用联系起来。
黄仁勋表示:“你们在大学里做开创性的机器人研究,随后在 Covariant 公司付诸实践。解决 99% 的问题至关重要。”
坚信客户会对你的网络性能和相关产品感到满意,这一点十分重要,Abbeel 非常赞同这种看法。他说,了解您开发的网络、运行大量测试和获得统计数据,才能获得如此信心。
他表示,Covariant Brain 目前用于进行仓库中的拾放工作,提升端到端性能才是最重要的。
“如果无法让客户满意,向他们推销又有什么意义呢?” Abbeel 如是说道。