
无论是侧方、垂直还是倾斜停车,都可能是结束驾驶时的一项繁重任务。
NVIDIA DRIVE Concierge 重新定义了停车体验,使人们能够在任何类型的空间内轻松无忧停车。凭借先进的智能召唤功能,该平台提供无缝的上落客体验,开启令人炫目的未来前景。
停车是一项极其复杂的任务。需要全面考虑这些因素:所有必要的交通标志和标记以确定停车是否合法、是可驶入空间还是装载区而不可驶入、旁边是否有消防栓或是否有街道清扫时间限制。
再加上由交通线和路缘划定的停车点边界,以及停车位常见的障碍物,如混凝土柱子和购物车。
DRIVE Concierge 使用各种传感器、高性能 AI 计算和灵活的模组化软件来处理所有这些条件和更多情况,驾驶员上下车服务,同时寻找停车位等待。
智能体系架构
可靠的停车服务始于以多样性和冗余为架构、用于实现安全操作目标的硬件设置。
DRIVE Concierge 基于 NVIDIA DRIVE Hyperion 8 而构建,其中包括高性能 集中式 NVIDIA DRIVE Orin 系统级芯片和完整的传感器体系架构。
Orin SoC 每秒可完成 254 万亿次运算,旨在处理自动驾驶汽车中同时运行的大量应用程序和深度神经网络,同时达到了 ISO 26262 ASIL-D 等系统安全标准。
DRIVE Hyperion 8 传感器套件由高保真环绕摄像头、雷达、超声波和前激光雷达组成,可提供 360 度环绕场景视图。这种多样化的传感器套件提供了为实现安全可靠的停车功能所需的冗余,尤其是在复杂的城市场景中。
工作原理:冗余和多样化的 DNN

除此之外,DriveWorks 是自动驾驶汽车的核心管道,为自动驾驶提供传感器、车辆抽象、传感器记录、处理和其他基本功能。
除了 Driveworks 之外,还有 DRIVE AV 和 DRIVE IX 应用程序。除了自动驾驶和主动安全之外,停车是 DRIVE 自动驾驶的三个组成部分之一。
并且,DRIVE IX 是一个开放的软件平台 DRIVE IX,提供启用创新 AI 驾驶舱解决方案和可视化所需的功能。
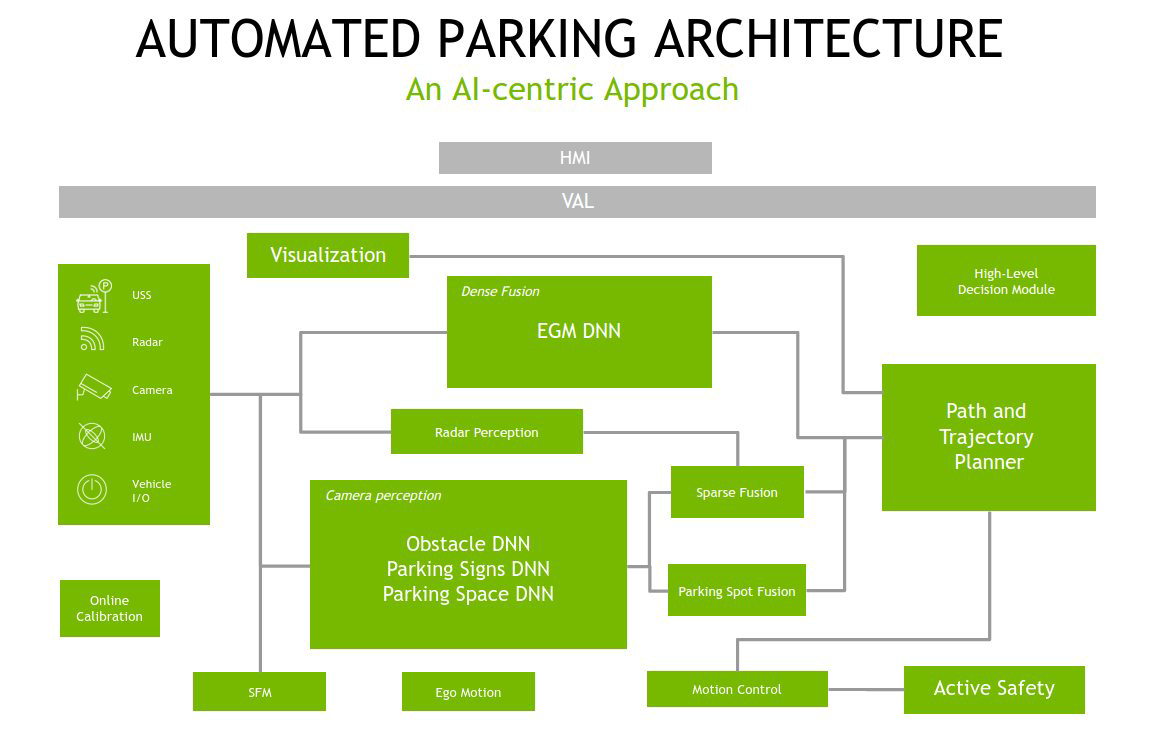
* 针对自我汽车所涉及对象的稀疏感知来源于基于摄像头和雷达的障碍物 DNN。稀疏感知旨在感知汽车周围相对较远距离的对象。
* 停车位感知来源于检测到的停车位与多个摄像头融合的停车标志之间的关联。
在过去,自动停车功能使用超声传感器的高水平功能来开发车辆周围环境的稀疏解释。但是,如果在车辆周围有动态行为者(如行人)或有动态障碍物的环境中,则这种方法很难实施。
而 DRIVE Concierge 融合了超声传感器和鱼眼摄像头的数据。其 Evidence Grid Map DNN 使用传感器的数据,在车辆附近生成实时密集网格地图。
密集融合可生成车辆周围空间是否可用以及空间是否可能被动态障碍物或静止障碍物占用的相关信息。然后,ParkNet DNN 将来自多个摄像头的图像融合在一起,并提供一份可供选择的潜在停车位列表。最后,停车位感知融合多个摄像头的数据以关联停车位和停车标志,以用于确定使用哪个停车位。
除了密集感知,停车功能还包括稀疏感知,后者借助摄像头和雷达数据感知远距离对象。
密集感知和稀疏感知模组使用冗余传感器数据,相辅相成,为下游路径和轨迹规划器模块构建准确的 4D 环境模型。
最后,车辆的路径和轨迹规划器模组使用此数据来规划车辆的停车操作,避免与近处对象和远距离高速障碍物发生碰撞。
综上,DRIVE Concierge 利用 DRIVE Hyperion 8 平台的全面传感器套件和经过安全认证的计算架构,提供无压力的可靠停车体验。