 在缝合组织手术中的精确度可达到亚毫米级。")
毫米级。
在接受外科手术时,您当然想要一位医术高明、经验丰富、双手稳定的医生,或者,仅仅一个技术非常好的机器人就足够了。
华盛顿国家儿童医学中心的研究人员使用机器人外科医生自主执行软组织手术,推动着这项事业不断发展。
引导之手
机器人辅助外科手术可以追溯到 20 世纪 80 年代中期,彼时英属哥伦比亚大学的一支团队开发出了可以辅助骨科手术的机器人。
三十年过去了,要使机器人在没有外科医生在场的情况下,承担更多复杂的手术,我们还要走很长的路。但最近借助 GPU 取得的进展,可以使外科手术更加安全、更易实施,并可降低手术费用。
国家儿童医学中心 (CNMC) 副首席外科医师兼该项目首席研究员 Peter Kim 说:“我们的目的不是在手术中排除外科医生,而是提供一个可以提高他们工作潜力或能力的智能选项或解决方案。”
即使机器人现已用于执行相对常规的自主“软组织手术”,但实际上是外科医生在引导机器人的每一步操作。这意味着由于受到外科医生的控制,机器人也同样受到限制。Kim 的团队提升了对机器人的要求,开发出可以在软组织上自主执行更加精密手术的机器人。
可达到亚毫米级精度的机器人手术
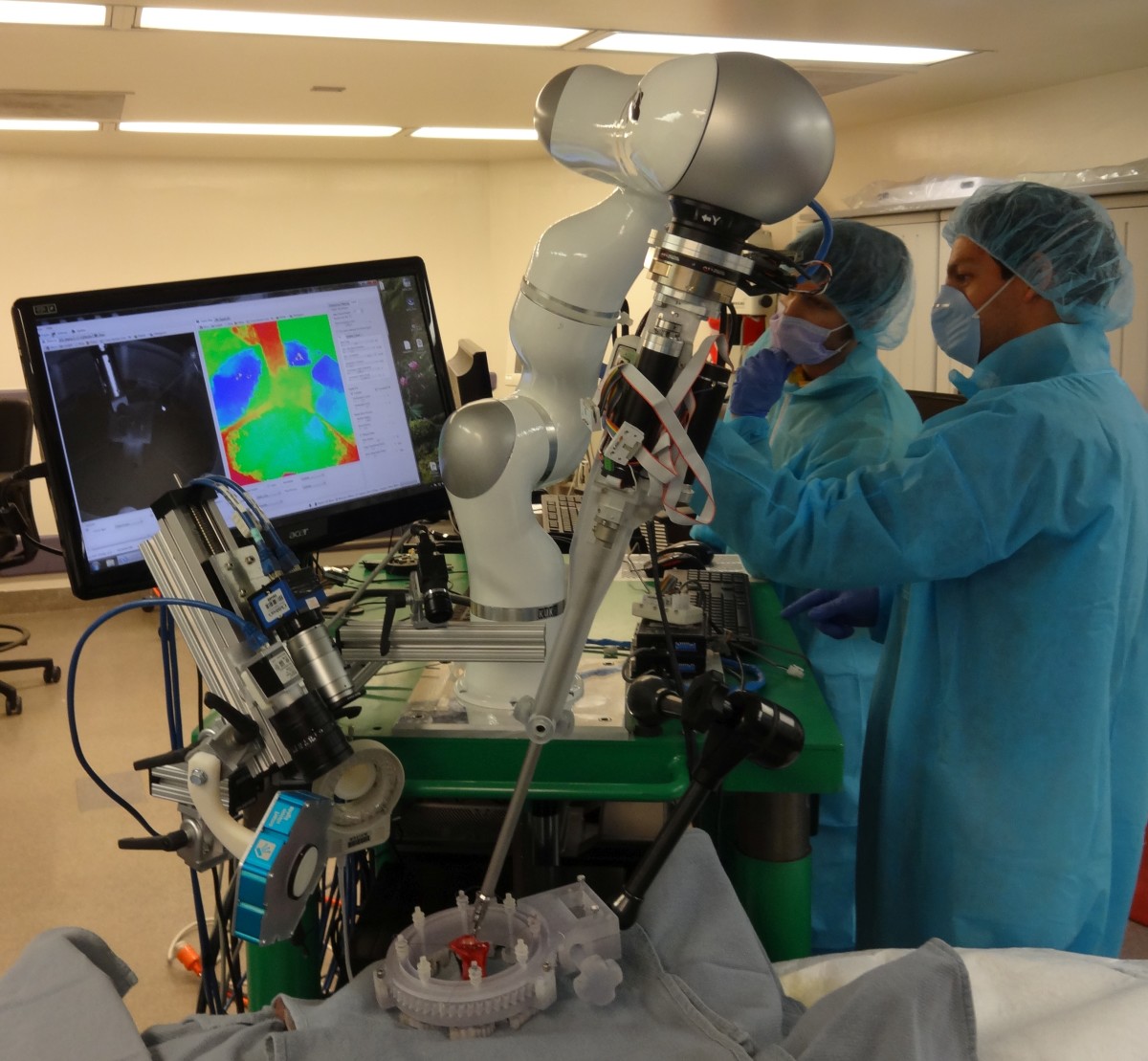
Kim 和他的团队采用创新的技术(包括 NVIDIA GeForce GTX TITAN GPU)来开发智能组织自动机器人。STAR 是一个手臂形状的设备,使用 3D 全光摄像头和近红外视觉技术,以亚毫米级精度精确找到要缝合的组织的位置。
研究人员还在机器人中融合了带有额外感知能力的腹腔镜缝合工具,这样,STAR 在组织上进行手术时,就可以“感觉”到张力和压力。另外,他们还就外科医生如何更好地完成复杂的外科手术任务达成共识,并据此对机器人进行编程。
该团队的研究成果已于近期发表在《科学转化医学》期刊上。
为测试 STAR 的能力,Kim(同时兼任乔治华盛顿大学医学院外科教授)选择让它在猪体内执行肠吻合(将两个管状结构缝合到一起)手术。
该团队之所以选择缝合手术,是因为这是一种相对常见而又复杂的外科手术。这种手术在美国每年执行百万余次,但从未摆脱人类直接控制,由机器自主执行过。从概念上来说,这和修复花园软管非常类似 – 目标都是紧密缝合、针脚间距一致,以防泄漏。
STAR 的小宇宙爆发
STAR 的成功不仅仅在于完成了首例机器人完全自主缝合手术,还在于它的操作是如此一致,缝合效果比另外一位执行同样任务的经验丰富的外科医生还要好。
Kim 说:“这台手术告诉我们,缝合手术不需要太多的智力即可完成”。
GPU 在 STAR 中起到至关重要的作用。GPU 用于加速计算来自全光摄像头的数据,而全光摄像头用于捕捉有关场景中传出的光的信息。这使 STAR 有了位置意识,并具备实时追踪目标组织的能力。
Kim 认为,如果 STAR 具有了足够的感知能力和智力,机器人外科医生最终便会应运而生,它们随时随地都能更好地执行各种类型的外科手术。特别是随着 STAR 拥有越来越多的感知、视觉及认知数据,并应用并行处理等超级计算方法时更是如此。
Kim 说:“这和自动驾驶汽车非常类似,我们起步于巡航控制、自动泊车、车道警告、自动停车,然后最终实现自动驾驶。目标是挽救生命,防止发生意外事故。智能外科手术,包括自主外科手术的出发点没有什么不同”。
图片由国家儿童医学中心的 Sheikh Zayed Institute 提供。