凭借对全球地理环境及其中所有事物的细致了解,地图为 AI 提供了做出先进安全的驾驶决策的预见性支持。
在 GTC 大会主题演讲中,NVIDIA 创始人兼首席执行官黄仁勋先生介绍了 NVIDIA DRIVE Map,这是一个多模式地图平台,旨在实现最高级别的自动驾驶并同时提高安全性。它兼具 DeepMap 测量地图的准确性与基于 AI 构建的众包地图的及时性和规模。
DRIVE Map 具有三个定位层,分别是摄像头、雷达和激光雷达,可提供更先进的 AI 驾驶员所需的冗余性和各种功能。
到 2024 年,DRIVE Map 将为北美、欧洲和亚洲的 50 万公里道路,提供实地测量的真值地图。这份地图将随着道路上的数百万辆乘用车而不断更新和扩展。
NVIDIA DRIVE Map 适用于整个自动驾驶汽车行业。
多层
DRIVE Map 包含多个定位层的数据,用于摄像头、雷达和激光雷达模式。AI 驾驶员可以单独定位到地图的每一层,这将提供多样性和冗余性,以实现最高级别的自动驾驶。
摄像头定位层包括车道分隔线、道路标记、道路边界、交通信号灯、标志和电线杆等地图属性。
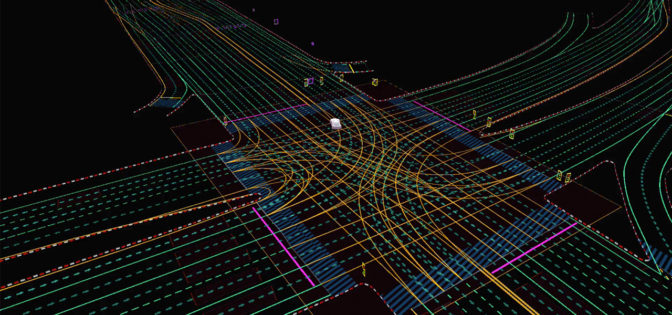
雷达定位层是雷达回波的聚合点云。在光线条件较差(对摄像头具有挑战性)和恶劣的天气条件(对摄像头和激光雷达都具有挑战性)下,它尤为实用。
雷达定位在无法提供典型地图属性的郊区也十分有用,这让 AI 驾驶员能够根据产生雷达回波的周围物体进行定位。
激光雷达体素层可提供更精确可靠的环境认知。它以 5 厘米的分辨率构建了一个 3D 世界,这是摄像头和雷达无法达到的精度。

在地图上定位后,AI 即可使用地图提供的详细语义信息提前规划并安全地执行驾驶决策了。
两全其美
DRIVE Map 通过两个地图引擎 – 真值地图引擎和众包地图引擎来收集和维护地球范围内车辆的集体记忆信息。
这种独特的方法将两者的出色性能相结合,既通过专用测量车辆实现了厘米级精度,又达到了只有数百万辆乘用车不断更新和扩展地图才能实现的及时性和规模。
真值地图引擎以 DeepMap 测量地图引擎为基础,后者是一项成熟技术,已在过去六年内得到开发与验证。
基于 AI 的众包引擎从数百万车辆中收集地图更新,并随着车辆行驶不断将新数据上传到云端。然后,汇总数据并上传到 NVIDIA Omniverse 用于更新地图,在几个小时内即可为现实世界中的车辆提供最新的无线地图更新。
DRIVE Map 还提供了一个数据接口 DRIVE MapStream,允许任何满足 DRIVE Map 要求的乘用车使用摄像头、雷达和激光雷达数据持续更新地图。
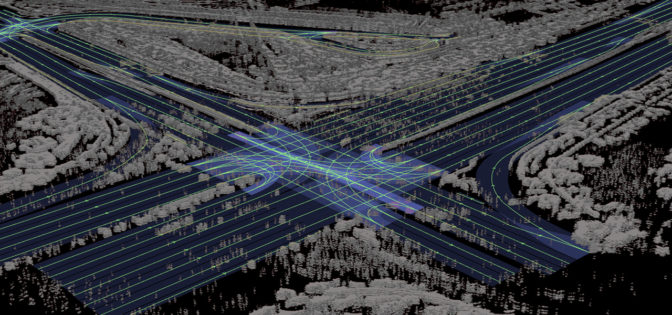
地球级数字孪生
除了帮助 AI 做出更佳的驾驶决策之外,DRIVE Map 还加快了自动驾驶汽车部署,包括为深度神经网络训练以及测试和验证生成真值训练数据。
这些工作流程以 Omniverse 为中心,加载和存储真实环境的地图数据。Omniverse 负责维护地球级的数字孪生表现形式,该数字孪生通过测量地图的车辆和数百万乘客用车不断更新和扩展。
通过使用基于 Omniverse 构建的自动化内容生成工具,将详细地图转换为可与 NVIDIA DRIVE Sim 一起使用的可驾驶仿真环境。道路标高、道路标记、交通岛、交通信号灯、标志和垂直柱等特征均以厘米级精度精确复制。
通过基于物理性质的传感器仿真和域随机化,自动驾驶汽车开发人员可以使用仿真环境生成实际数据中不支持的训练场景。
此外,自动驾驶汽车开发者还可以应用场景生成工具在数字孪生环境中测试自动驾驶汽车软件,然后再在真实环境中部署自动驾驶汽车。最后,数字孪生为车队运营商提供了一个完整的虚拟视图,以便车辆在全球范围内行驶,并根据需要协助远程操作。
作为一个功能非常齐全且可扩展的平台,DRIVE Map 让 AI 驾驶员能够理解不断提升自动驾驶能力所需的环境。