将传统汽车转变为自动驾驶车辆是一项巨大挑战。在 NVIDIA,我们将通过构建重要的自动驾驶模块(分为感知、定位和规划/控制软件)并应用高性能计算来应对这一挑战。
为了测试和验证我们的 DRIVE AV 软件,我们利用 DRIVE Constellation 平台来使用模拟测试,并在位于加利福尼亚州圣克拉拉的总部周围及世界各地的其他地区运营测试汽车。
通过安全认证的驾驶员驾驶以及副驾驶对系统的监控,这些汽车可以驾驭高速公路互通立交、车道变化及其他操作,从而在现实世界中测试各种软件组件。
通过新的人工智能 (AI) 看世界
我们的感知构建块的核心是深度神经网络 (DNN)。这些算法是受人类大脑启发并由经验习得的数学模型。
我们使用 DriveNet DNN,通过数据的驱动获得对障碍(例如汽车与行人)的理解,同时计算出与这些障碍的距离。LaneNet 用于检测车道信息,而一组 DNN 可用于感知可行驶的道路。
WaitNet、LightNet 以及 SignNet 分别用于检测和分类等待条件,即交叉路口、交通灯和交通标志。ClearSightNet DNN 还可以在后台运行,并评估摄像头是否清晰、是否被遮挡或堵塞。
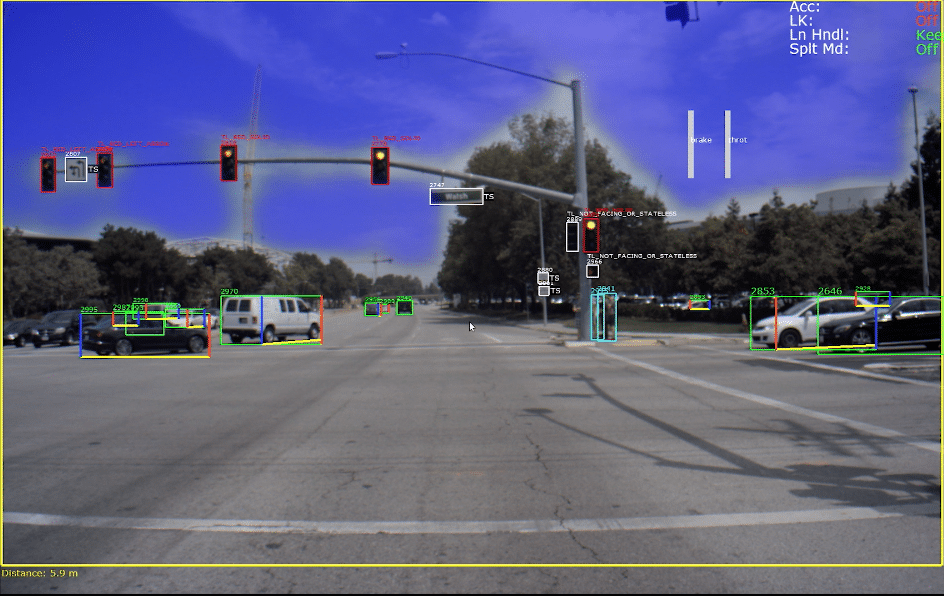
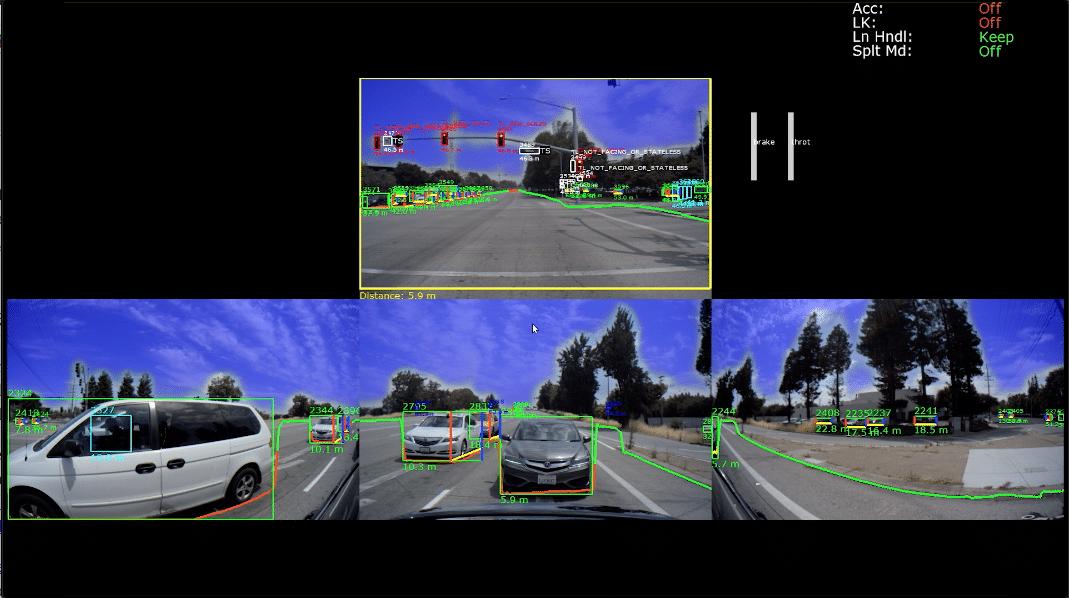
对于某些功能,如目标跟踪,也可以使用传统的计算机视觉技术,从而实现重要的效率效益。借助多摄像机环绕感知功能,基于 DNN 以及传统计算机的视觉功能都可以提供环汽车 360 度的全景视野。
地图上
定位是软件的支柱,能够让自动驾驶汽车准确了解其在道路上的位置。通过采用高清地图信息、所需的驾驶路线信息和实时的定位结果,自动驾驶汽车可以为其目标路线创建出发地到目的地的车道规划。
所绘制的车道规划提供了有关自动驾驶汽车在路线中何时需要保持车道、变换车道或协商车道交叉/分离/并道的信息。这些车道规划模式的通知会发送至计划和控制软件以待执行。
定位信息还可用于计算关键信息,如预计到达目的地的时间 (ETA),以及在创建的车道规划中实时跟踪车辆的位置。
橡胶道路
通过感知和定位提供的输入信息,规划和控制层可实现自动驾驶汽车物理层面的自动驾驶。规划软件通过分析感知和定位的结果来确定汽车完成特定操纵所需的物理轨迹。
例如,对于上述视频中展示的自动变道,规划软件首先使用环绕摄像头和雷达感知来进行变道安全检查,以确保可以执行预期的操作。
接下来,它将计算从当前车道的中心到目标车道的中心所需的纵向速度剖面和横向路径规划。然后控制软件发出加速/减速和左右转向命令来执行换道计划。
运行这些组件的引擎是高性能、高能效的 NVIDIA DRIVE AGX 平台。DRIVE AGX 使您能够实时并同时运行功能丰富的 360度的环绕感知、定位以及规划和控制软件。
这些组件共同创造了多样性和重复性,从而实现安全的自动驾驶。
要了解我们所构建的软件功能的更多信息,请查看 DRIVE Labs 系列的其他部分。